Tips for rpg trajectory evaluation
in Posts / Programming
Preliminaries
- catkin_simple
- rpg_trajectory_evaluation
uzh-rpg - rpg_trajectory_evaluation
- latex install
sudo apt install texlive-fonts-recommended texlive-fonts-extra
sudo apt install dvipng
Single Evaluation
rosrun rpg_trajectory_evaluation analyze_trajectory_single.py <VIO_result> --recalculate_errors --png
Example
- VIO_result : rpg_traj/laptop/vins_line/laptop_vins_line_V2_01
Multiple Evaluation
rosrun rpg_trajectory_evaluation analyze_trajectories.py line.yaml --output_dir=<evaluation_result> --results_dir=<VIO_results> --platform laptop --odometry_error_per_dataset --plot_trajectories --rmse_table --rmse_boxplot --png
- evaluation_result : /home/hyunjun/rpg_traj/laptop/results
- VIO_results : /home/hyunjun/rpg_traj/
- line.yaml in /home/hyunjun/paper_ws/src/rpg_trajectory_evaluation/analyze_trajectories_config
Datasets:
MH_01:
label: MH01
MH_02:
label: MH02
MH_03:
label: MH03
MH_04:
label: MH04
MH_05:
label: MH05
V1_01:
label: V101
V1_02:
label: V102
V1_03:
label: V103
V2_01:
label: V201
V2_02:
label: V202
V2_03:
label: V203
Algorithms:
vins_mono:
fn: traj_est
label: VINS-Mono
vins_line:
fn: traj_est
label: VINS-Line
proposed:
fn: traj_est
label: Proposed
RelDistances: []
RelDistancePercentages: []
Folder Configuration
Folder name should be in the form of
- rpg_traj
- laptop
- vins_line
- laptop_vins_line_MH_01
- laptop_vins_line_MH_02
- laptop_vins_line_MH_03
- laptop_vins_line_MH_04
- laptop_vins_line_MH_05
- vins_mono
- laptop_vins_mono_MH_01
- laptop_vins_mono_MH_02
- laptop_vins_mono_MH_03
- laptop_vins_mono_MH_04
- laptop_vins_mono_MH_05
- vins_line
- laptop
- Example
How to save odometry results in VINS-Mono, VINS-Fusion
/vins_estimator/src/utility/visualization.cpp
// write result to file
ofstream foutC(VINS_RESULT_PATH, ios::app);
foutC.setf(ios::fixed, ios::floatfield);
foutC.precision(9);
foutC << header.stamp.toSec()/* * 1e9 */<< " ";
foutC.precision(6);
foutC << estimator.Ps[WINDOW_SIZE].x() << " "
<< estimator.Ps[WINDOW_SIZE].y() << " "
<< estimator.Ps[WINDOW_SIZE].z() << " "
<< tmp_Q.x() << " "
<< tmp_Q.y() << " "
<< tmp_Q.z() << " "
<< tmp_Q.w() << endl;
foutC.close();
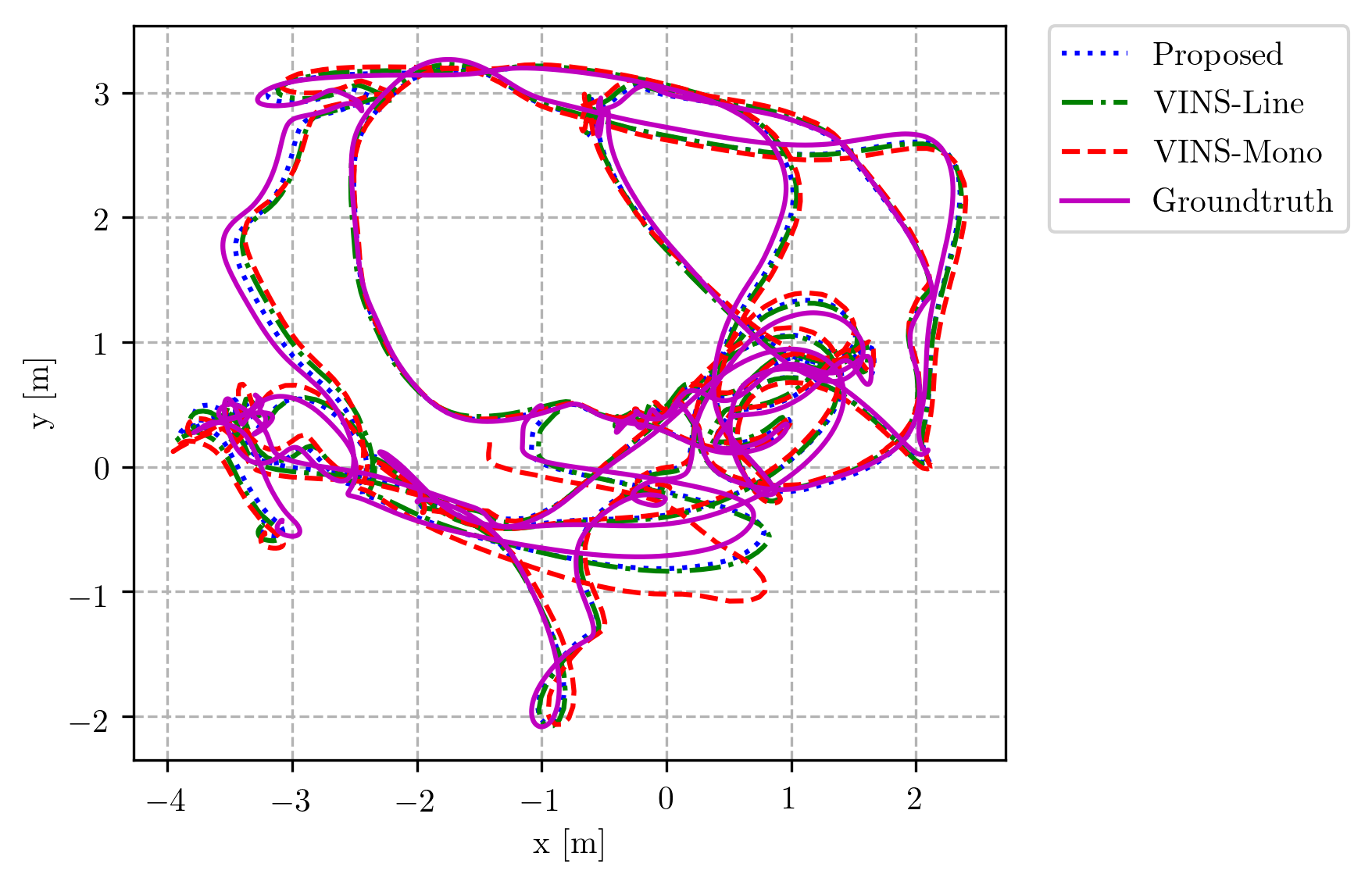
How to change line style of Multiple evaluation plot
rpg_trajectory_evaluation/plot_utils.py
def plot_trajectory_top(ax, pos, color, name, alpha=1.0):
ax.grid(ls='--', color='0.7')
# pos_0 = pos - pos[0, :]
if name == 'Proposed':
color = color+':'
elif name == 'VINS-Line':
color = color+'-.'
elif name == 'VINS-Mono':
color = color+'--'
else:
color = color+'-'
ax.plot(pos[:, 0], pos[:, 1], color, alpha=alpha, label=name)
def plot_trajectory_side(ax, pos, color, name, alpha=1.0):
ax.grid(ls='--', color='0.7')
# pos_0 = pos - pos[0, :]
if name == 'Proposed':
color = color+':'
elif name == 'VINS-Line':
color = color+'-.'
elif name == 'VINS-Mono':
color = color+'--'
else:
color = color+'-'
ax.plot(pos[:, 0], pos[:, 2], color, alpha=alpha, label=name)